工程坐标转换方法C#代码实现-创新互联
- 1. 前言
- 2. 计算总体框架
- 3. C#代码实现
- 3.1 整体类的构建
- 3.2 椭球参数赋值
- 3.3 转换1、3(大地经纬度坐标与地心地固坐标的转换)
- 3.4 投影转换
- 3.5 转换2的实现(三参数、七参数)
- 3.6 转换5的实现(四参数+高程拟合)
- 3.7 调用过程
- 3.7.1 一步法
- 3.7.2 两步法
- 4. 总结
在前面的文章中系统的阐述了工程坐标的转换类别和转换的方法。关于转换代码实现,有很多的类库:
- GDAL
- SharpProj - Providing OSGEO PROJ for .Net (Core)
- ProjNet (for GeoAPI)
这里针对GPS接收的WGS84椭球的经纬度转换为地方坐标系的问题,利用C#,对工程坐标转换方法和步骤做出详细的解答。不基于任何类库和函数库,也未使用矩阵库,可以便利的将代码移植到任何语言。
2. 计算总体框架
根据上一篇文章中对七参数、四参数、高程拟合在坐标转换的作用和使用条件的阐述,我们可以将上一篇文章第7节的总结图,按照计算的流程重新绘制。
根据上图可知,预将WGS84椭球的GPS坐标需要经过5次转换。其中,
- 转换1、转换3在charlee44的博客:大地经纬度坐标与地心地固坐标的转换中详细讲解了,并且有C++代码的实现,利用C#重构即可。
- 转换2、转换5,以及他们的组合,在我的上一篇文章(工程)坐标转换类别和方法也详细的讲解了。
因此,根据计算原理,直接可以利用C#代码实现。
3. C#代码实现 3.1 整体类的构建
5个转换是对点的操作,不妨构建自定义点类MyPoint,在这个类中定义转换方法。在实现转换方法之前,需要定义数据属性,以承载转换参数和转换数据。代码框架如下:
internal class MyPoint
{// 定义椭球类型。这里仅列举了4中国内常见的椭球类型
// 国际椭球可以增加自行定义
public enum EllipsoidType
{ WGS84,
CGCS2000,
西安80,
北京54
}
//大地坐标经度、维度、高度
public double L {get; set; }
public double B {get; set; }
public double H {get; set; }
//空间坐标系
public double X {get; set; }
public double Y {get; set; }
public double Z {get; set; }
//七参数转换后的空间坐标
public double X2 {get; set; }
public double Y2 {get; set; }
public double Z2 {get; set; }
private double a = 0, f = 0, b = 0, e = 0, e2 = 0; //椭球参数
private readonly double rho = 180 / Math.PI;
private readonly double d2r = Math.PI / 180;
public double Xs {get; set; }
public double Ys {get; set; }
public double Hs {get; set; }
//七参数 三个线性平移量-单位米 三个旋转平移量-十进制秒为单位(运算时注意转换为度) 比例因子-单位百万分率 (ppm)
//测量队给出的七参数单位与计算的单位不同,要进行单位转化 1 秒=0.0000048481373323 弧度
//尺度因子有两种单位的表示形式,一种结果约为1,如1.0000045,用k表示;
//另一种就是ppm的表示形式,稍微比1大一点,如4.5,用m表示。k=m/1000000
private double dx = 0, dy = 0, dz = 0, rx = 0, ry = 0, rz = 0, m = 0, k = 0;
}常见的椭球参数值在我的文章经纬度坐标转换为工程坐标可以找到,这里选取与上述代码对应的4类椭球,并在上述MyPoint类中增加函数EllipsoidParam(EllipsoidType type)。
////// 椭球参数设置
/// ///椭球类型private void EllipsoidParam(EllipsoidType type)
{// CGCS2000 椭球参数
if (type == EllipsoidType.CGCS2000)
{this.a = 6378137;
this.f = 1 / 298.257222101;
}
// 西安 80
else if (type == EllipsoidType.西安80)
{this.a = 6378140;
this.f = 1 / 298.257;
}
// 北京 54
else if (type == EllipsoidType.北京54)
{this.a = 6378245;
this.f = 1 / 298.3;
}
// WGS-84
else
{this.a = 6378137;
this.f = 1 / 298.257223563;
}
this.b = this.a * (1 - this.f);
this.e = Math.Sqrt(this.a * this.a - this.b * this.b) / this.a; //第一偏心率
this.e2 = Math.Sqrt(this.a * this.a - this.b * this.b) / this.b; //第二偏心率
}charlee44的博客有C++代码的实现,现在利用C#重构即可。上述MyPoint类中增加BLH2XYZ(EllipsoidType type)和XYZ2BLH(EllipsoidType type)两个函数。
////// 经纬度坐标转空间直角坐标
/// ///椭球类型public void BLH2XYZ(EllipsoidType type = EllipsoidType.WGS84)
{EllipsoidParam(type);
double sB = Math.Sin(this.B * d2r);
double cB = Math.Cos(this.B * d2r);
double sL = Math.Sin(this.L * d2r);
double cL = Math.Cos(this.L * d2r);
double N = this.a / (Math.Sqrt(1 - this.e * this.e * sB * sB));
this.X = (N + this.H) * cB * cL;
this.Y = (N + this.H) * cB * sL;
this.Z = (N * (1 - this.e * this.e) + this.H) * sB;
this.X2 = this.X;
this.Y2 = this.Y;
this.Z2 = this.Z;
}
////// 空间直角坐标转经纬度坐标
/// ///椭球类型public void XYZ2BLH(EllipsoidType type)
{EllipsoidParam(type);
// 这里转出来的B L是弧度
this.L = Math.Atan(this.Y2 / this.X2) + Math.PI;
this.L = this.L * 180 / Math.PI;
// B需要迭代计算
double B2 = Math.Atan(Z2 / Math.Sqrt(X2 * X2 + Y2 * Y2));
double B1;
double N;
while (true)
{N = a / Math.Sqrt(1 - f * (2 - f) * Math.Sin(B2) * Math.Sin(B2));
B1 = Math.Atan((Z2 + N * f * (2 - f) * Math.Sin(B2)) / Math.Sqrt(X2 * X2 + Y2 * Y2));
if (Math.Abs(B1 - B2)< 1e-12)
break;
B2 = B1;
}
this.B = B2 * 180 / Math.PI;
double sB = Math.Sin(this.B * d2r);
double cB = Math.Cos(this.B * d2r);
this.H = this.Z2 / sB - N * (1 - this.e * this.e);
}此处仅实现了常见的高斯-克里格投影。上述MyPoint类中增加GaussProjection(EllipsoidType type, ProjectionSetting prjSetting)函数。
////// 利用高斯投影将指定椭球类型的经纬度坐标转为投影坐标
/// ///椭球类型///投影设置实例public void GaussProjection(EllipsoidType type, ProjectionSetting prjSetting)
{this.EllipsoidParam(type);
double l = (this.L - prjSetting.CenterL) / this.rho;
double cB = Math.Cos(this.B * this.d2r);
double sB = Math.Sin(this.B * this.d2r);
double s2b = Math.Sin(this.B * this.d2r * 2);
double s4b = Math.Sin(this.B * this.d2r * 4);
double s6b = Math.Sin(this.B * this.d2r * 6);
double s8b = Math.Sin(this.B * this.d2r * 8);
double N = this.a / Math.Sqrt(1 - this.e * this.e * sB * sB); // 卯酉圈曲率半径
double t = Math.Tan(this.B * this.d2r);
double eta = this.e2 * cB;
double m0 = this.a * (1 - this.e * this.e);
double m2 = 3.0 / 2.0 * this.e * this.e * m0;
double m4 = 5.0 / 4.0 * this.e * this.e * m2;
double m6 = 7.0 / 6.0 * this.e * this.e * m4;
double m8 = 9.0 / 8.0 * this.e * this.e * m6;
double a0 = m0 + 1.0 / 2.0 * m2 + 3.0 / 8.0 * m4 + 5.0 / 16.0 * m6 + 35.0 / 128.0 * m8;
double a2 = 1.0 / 2.0 * m2 + 1.0 / 2.0 * m4 + 15.0 / 32.0 * m6 + 7.0 / 16.0 * m8;
double a4 = 1.0 / 8.0 * m4 + 3.0 / 16.0 * m6 + 7.0 / 32.0 * m8;
double a6 = 1.0 / 32.0 * m6 + 1.0 / 16.0 * m8;
double a8 = 1.0 / 128.0 * m8;
// X1为自赤道量起的子午线弧长
double X1 = a0 * (this.B * this.d2r) - 1.0 / 2.0 * a2 * s2b + 1.0 / 4.0 * a4 * s4b - 1.0 / 6.0 * a6 * s6b + 1.0 / 8.0 * a8 * s8b;
this.Xs = X1 + N / 2 * t * cB * cB * l * l + N / 24 * t * (5 - t * t + 9 * Math.Pow(eta, 2) + 4 * Math.Pow(eta, 4)) * Math.Pow(cB, 4) * Math.Pow(l, 4)
+ N / 720 * t * (61 - 58 * t * t + Math.Pow(t, 4)) * Math.Pow(cB, 6) * Math.Pow(l, 6);
this.Ys = N * cB * l + N / 6 * (1 - t * t + eta * eta) * Math.Pow(cB, 3) * Math.Pow(l, 3)
+ N / 120 * (5 - 18 * t * t + Math.Pow(t, 4) + 14 * Math.Pow(eta, 2) - 58 * eta * eta * t * t) * Math.Pow(cB, 5) * Math.Pow(l, 5);
this.Hs = this.H;
// 假东 假北偏移
this.Xs += prjSetting.PseudoNorth;
this.Ys += prjSetting.PseudoEast;
}
其中,ProjectionSetting是一个投影参数设置类,独立于MyPoint类,用于设定中央经线、东偏等投影参数。
internal class ProjectionSetting
{private double _centerL;
public double CenterL
{ get {return _centerL; }
set {_centerL = value; }
}
private double _centerB;
public double CenterB
{ get {return _centerB; }
set {_centerB = value; }
}
private double _pseudoEast;
public double PseudoEast
{ get {return _pseudoEast; }
set {_pseudoEast = value; }
}
private double _pseudoNorth;
public double PseudoNorth
{ get {return _pseudoNorth; }
set {_pseudoNorth = value; }
}
private double _prjScale;
public double PrjScale
{ get {return _prjScale; }
set {_prjScale = value; }
}
////// 设置全部的投影参数
/// ///////////////public ProjectionSetting(double centerL, double centerB,
double pseudoEast, double pseudoNorth,
double prjScale)
{ CenterL = centerL;
CenterB = centerB;
PseudoEast = pseudoEast;
PseudoNorth = pseudoNorth;
PrjScale = prjScale;
}
////// 仅设置中央经线和东偏
/// //////public ProjectionSetting(double centerL, double pseudoEast)
{CenterL = centerL;
CenterB = 0.0;
PseudoEast = pseudoEast;
PseudoNorth = 0.0;
PrjScale = 1.0;
}
////// 默认常用投影参数,中央经线120°,东偏500000
/// public ProjectionSetting()
{CenterL = 120.0;
CenterB = 0.0;
PseudoEast = 500000;
PseudoNorth = 0.0;
PrjScale = 1.0;
}
}上述MyPoint类中增加SevenParamTrans(Datum7Paras datum7Paras)和TreeParamTrans(Datum3Paras datum3Paras)函数。
////// 利用7参数进行坐标系之间转换
/// ///7参数实例public void SevenParamTrans(Datum7Paras datum7Paras)
{this.dx = datum7Paras.Dx;
this.dy = datum7Paras.Dy;
this.dz = datum7Paras.Dz;
this.rx = datum7Paras.Rx * 0.0000048481373323; //1 秒=0.0000048481373323 弧度
this.ry = datum7Paras.Ry * 0.0000048481373323;
this.rz = datum7Paras.Rz * 0.0000048481373323;
this.m = datum7Paras.PPM;
this.k = this.m / 1000000;
this.X2 = (1 + k) * (this.X + this.rz * this.Y - this.ry * this.Z) + this.dx;
this.Y2 = (1 + k) * (-this.rz * this.X + this.Y + this.rx * this.Z) + this.dy;
this.Z2 = (1 + k) * (this.ry * this.X - this.rx * this.Y + this.Z) + this.dz;
}
////// 利用3参数进行坐标系之间转换
/// ///3参数实例public void TreeParamTrans(Datum3Paras datum3Paras)
{this.dx = datum3Paras.Dx;
this.dy = datum3Paras.Dy;
this.dz = datum3Paras.Dz;
this.X2 = this.X + this.dx;
this.Y2 = this.Y + this.dy;
this.Z2 = this.Z + this.dz;
}
Datum3Paras和Datum7Paras是独立于MyPoint类,用于设定坐标转换参数。
////// 7参数
/// internal class Datum7Paras
{private double _dx;
public double Dx
{ get {return _dx; }
set {_dx = value; }
}
private double _dy;
public double Dy
{get {return _dy; }
set {_dy = value; }
}
private double _dz;
public double Dz
{get {return _dz; }
set {_dz = value; }
}
private double _rx;
public double Rx
{get {return _rx; }
set {_rx = value; }
}
private double _ry;
public double Ry
{get {return _ry; }
set {_ry = value; }
}
private double _rz;
public double Rz
{get {return _rz; }
set {_rz = value; }
}
private double _ppm;
public double PPM
{get {return _ppm; }
set {_ppm = value; }
}
public Datum7Paras(double dx, double dy, double dz,
double rx, double ry, double rz,
double ppm)
{_dx = dx;
_dy = dy;
_dz = dz;
_rx = rx;
_ry = ry;
_rz = rz;
_ppm = ppm;
}
}internal class Datum3Paras
{private double _dx;
public double Dx
{get {return _dx; }
set {_dx = value; }
}
private double _dy;
public double Dy
{get {return _dy; }
set {_dy = value; }
}
private double _dz;
public double Dz
{get {return _dz; }
set {_dz = value; }
}
public Datum3Paras(double dx, double dy, double dz)
{Dx = dx;
Dy = dy;
Dz = dz;
}
}上述MyPoint类中增加Transform4Para(Trans4Paras transPara)函数。此处,高程拟合仅实现了已知一个测点的固定改正差。
////// 投影坐标获取后,进一步利用4参数转换坐标
/// ///public void Transform4Para(Trans4Paras transPara)
{var X1 = transPara.Dx;
var Y1 = transPara.Dy;
var cosAngle = Math.Cos(transPara.A);
var sinAngle = Math.Sin(transPara.A);
X1 += transPara.K * (cosAngle * this.Xs - sinAngle * this.Ys);
Y1 += transPara.K * (sinAngle * this.Xs + cosAngle * this.Ys);
this.Xs = X1;
this.Ys = Y1;
// 固定改正差
this.Hs += transPara.Dh;
}Trans4Paras是独立于MyPoint类,用于设定坐标转换参数。
internal class Trans4Paras
{private double _dx;
public double Dx
{get {return _dx; }
set {_dx = value; }
}
private double _dy;
public double Dy
{get {return _dy; }
set {_dy = value; }
}
private double _a;
public double A
{get {return _a; }
set {_a = value; }
}
private double _k;
public double K
{get {return _k; }
set {_k = value; }
}
private double _dh;
public double Dh
{get {return _dh; }
set {_dh = value; }
}
public Trans4Paras(double dx, double dy, double a, double k, double dh)
{Dx = dx;
Dy = dy;
A = a;
K = k;
Dh = dh;
}
public Trans4Paras()
{}
}里面的参数,因为保密原因,做出了随机更改,实际使用时可根据自己情况赋值。
3.7.1 一步法// 实例化计算参数
MyPoint p = new MyPoint();.
p.L=113.256;
p.B=31.565;
p.H=5.216;
// 经纬度转空间坐标
p.BLH2XYZ();
// 实例化七参数
Datum7Paras datum7Paras = new Datum7Paras(
489.2994563566, 141.1525159753, 15.74421120568,
-0.164423, 4.141573, -4.808299,
-6.56482989958);
p.SevenParamTrans(datum7Paras);
// 空间坐标转回经纬度
p.XYZ2BLH(EllipsoidType.WGS84);
// 高斯投影 经纬度转平面坐标
// 实例化投影参数类
ProjectionSetting projectionSetting = new ProjectionSetting(120,500000);
p.GaussProjection(EllipsoidType.WGS84, projectionSetting);
// 实例化计算参数
MyPoint p = new MyPoint();.
p.SetLBH(113.256,31.565,5.216);
// 经纬度转空间坐标
p.BLH2XYZ();
// 实例化七参数
Datum7Paras datum7Paras = new Datum7Paras(
489.2994563566, 141.1525159753, 15.74421120568,
-0.164423, 4.141573, -4.808299,
-6.56482989958);
p.SevenParamTrans(datum7Paras);
// 空间坐标转回经纬度
p.XYZ2BLH(EllipsoidType.WGS84);
// 高斯投影 经纬度转平面坐标
// 实例化投影参数类
ProjectionSetting projectionSetting = new ProjectionSetting(120,500000);
p.GaussProjection(EllipsoidType.WGS84, projectionSetting);
Trans4Paras transformPara = new(6456.15957352521, -134618.390707439, 0.011104964500129, 1.00002537583871, 5.788);
p.Transform4Para(transformPara);
4. 总结
至此,关于工程坐标系转化,即GPS接收的WGS84椭球的经纬度转换为地方坐标系的问题,基本全部实现。代码正确性和准确性的验证是与 南方GPS工具箱做对比。例如,采用上述的一步法,在设定好坐标、7参数、投影参数后,计算发现,与南方GPS工具箱在y方向偏差1mm。结果如下图: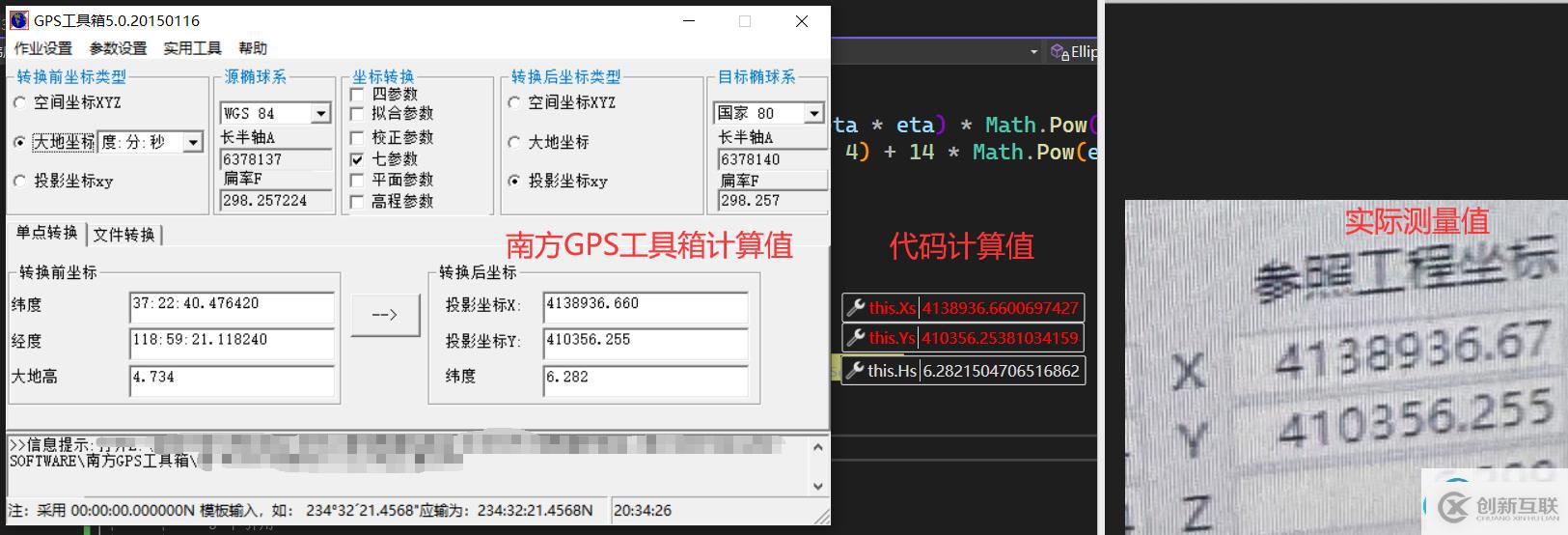
你是否还在寻找稳定的海外服务器提供商?创新互联www.cdcxhl.cn海外机房具备T级流量清洗系统配攻击溯源,准确流量调度确保服务器高可用性,企业级服务器适合批量采购,新人活动首月15元起,快前往官网查看详情吧
分享名称:工程坐标转换方法C#代码实现-创新互联
分享URL:https://www.cdcxhl.com/article18/cescgp.html
成都网站建设公司_创新互联,为您提供域名注册、网站导航、做网站、响应式网站、自适应网站、网站维护
声明:本网站发布的内容(图片、视频和文字)以用户投稿、用户转载内容为主,如果涉及侵权请尽快告知,我们将会在第一时间删除。文章观点不代表本网站立场,如需处理请联系客服。电话:028-86922220;邮箱:631063699@qq.com。内容未经允许不得转载,或转载时需注明来源: 创新互联

- 成都app开发更看重的是创意 2022-07-19
- 成都app开发,要学会善用哪些技术? 2022-07-21
- 上海灯光控制APP开发意义有哪些? 2021-01-03
- 成都APP开发的一些琐碎事 2021-10-04
- 企业移动APP开发提升质量和效率必须重视这四点 2020-11-30
- 上海求职招聘APP开发如何提升粘性 2020-12-31
- 选择APP开发公司需要规避哪些坑 2022-08-22
- 广东APP开发公司现状大盘点 2020-12-07
- 定制化APP开发要搞懂你适合原生APP开发还是混合APP开发 2022-12-01
- 智能充电桩APP开发有那些痛点? 2023-02-08
- 兴国医疗|美容行业APP开发有哪些类型? 2020-12-14
- app定制开发或普通app开发有哪些制作方式? 2020-12-13