美术馆定理三角划分c++实现-创新互联
最少只需多少名保安便可监视任意一个形状为简单多边形的美术馆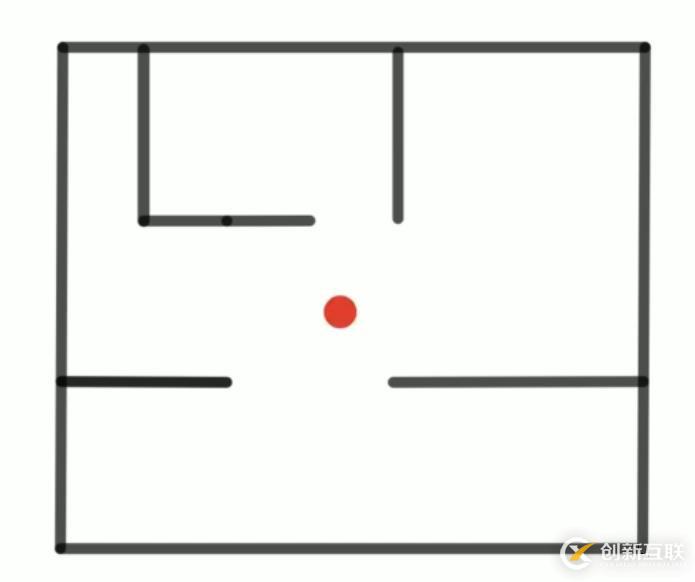
首先必须知道只需要一个保安就可以监视凸多边形



首先不考虑最优解,我们先考虑简单的情况,就是将简单多边形三角拆分成一个个三角形,每个三角形放一个保安那么肯定是满足这个问题的解。
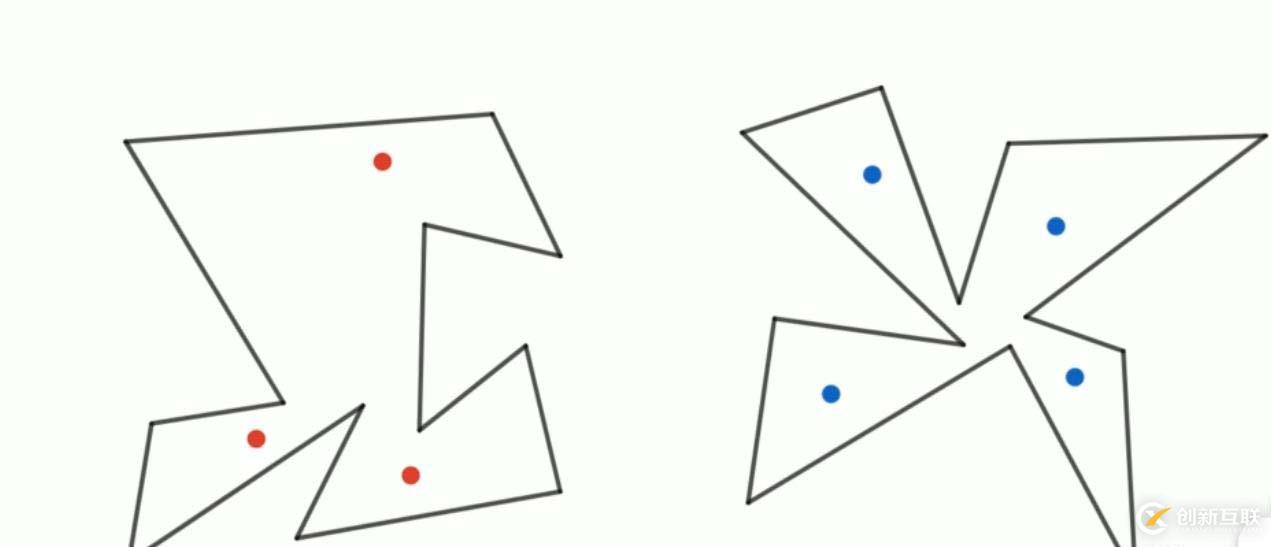
这么看来一些三角形可以被多个保安看到,那么这说明这不是最优解。
三角拆分可以三角拆分的多边形必须满足下面这个条件:
简单凸多边形可以拆分为边数n,n-2个三角形
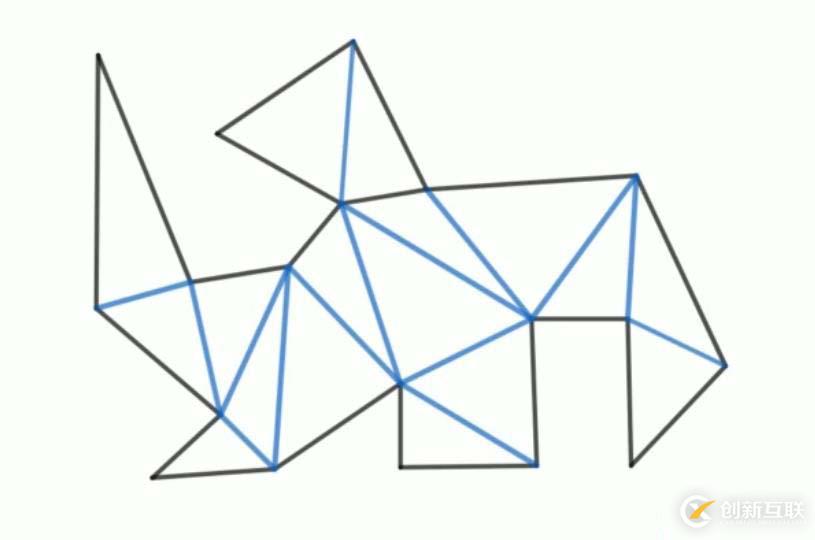
然后进行三染色问题的简化,最后可以得到n/3向下取整个三角形
把保安放在最少的颜色的那些个顶点上,即满足解法。
推出下面这个答案


对角线是由两个位于多边形内部的不连续的顶点组成
1.对角线的端点应该是多边形的顶点
2.对角线必须完全位于多边形内部
像上面两条线就不是对角线

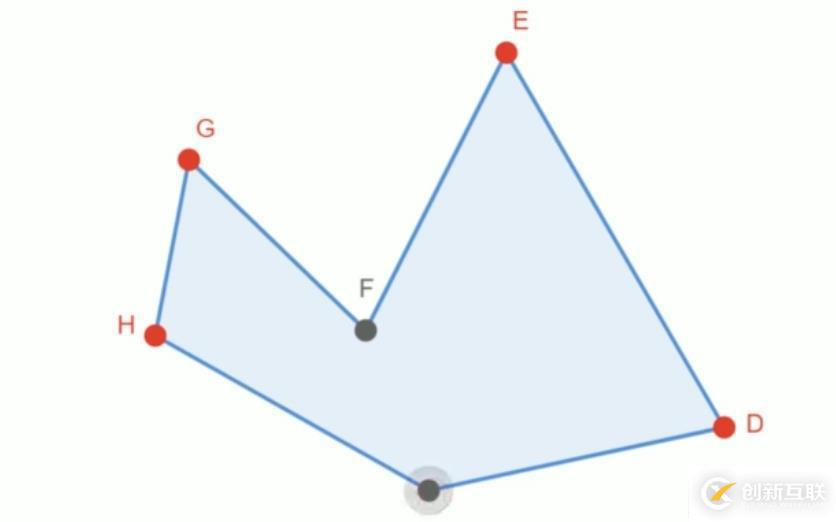
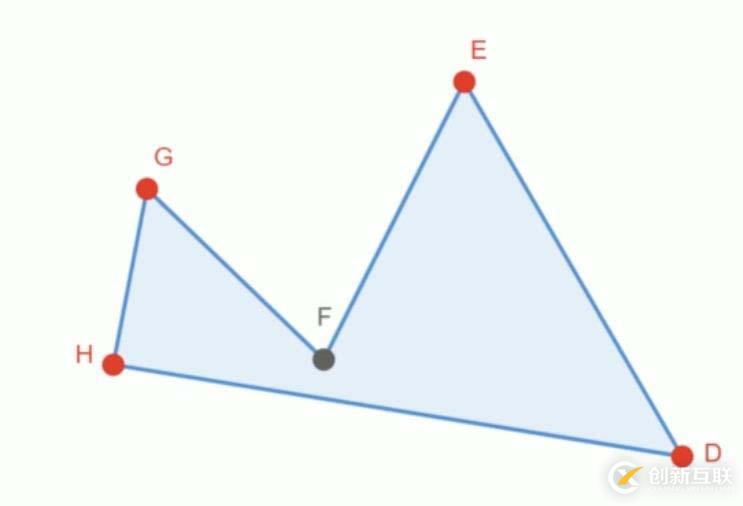
比方说,一个多边形的顶点是由三个连续的顶点构成的V1 v2 v3其中v2是凸顶点。
V1和V3之间的连线应为一条对角线。
如下图所示:
判断v2点在v1v3向量的相对位置,如果是左边那么v2就是凸点,否则就是凹点。

但是可以看到如果按顺序去分割会出现相交点

一旦连接则移除

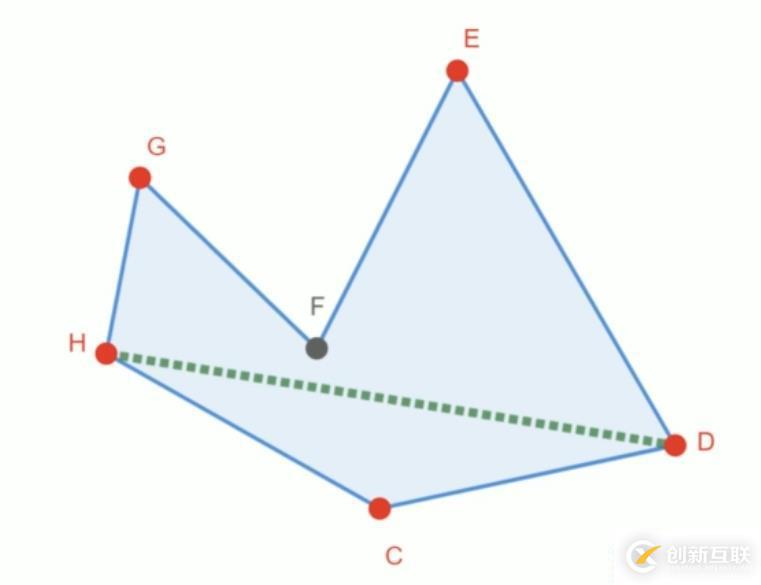
此时H D不是凸点




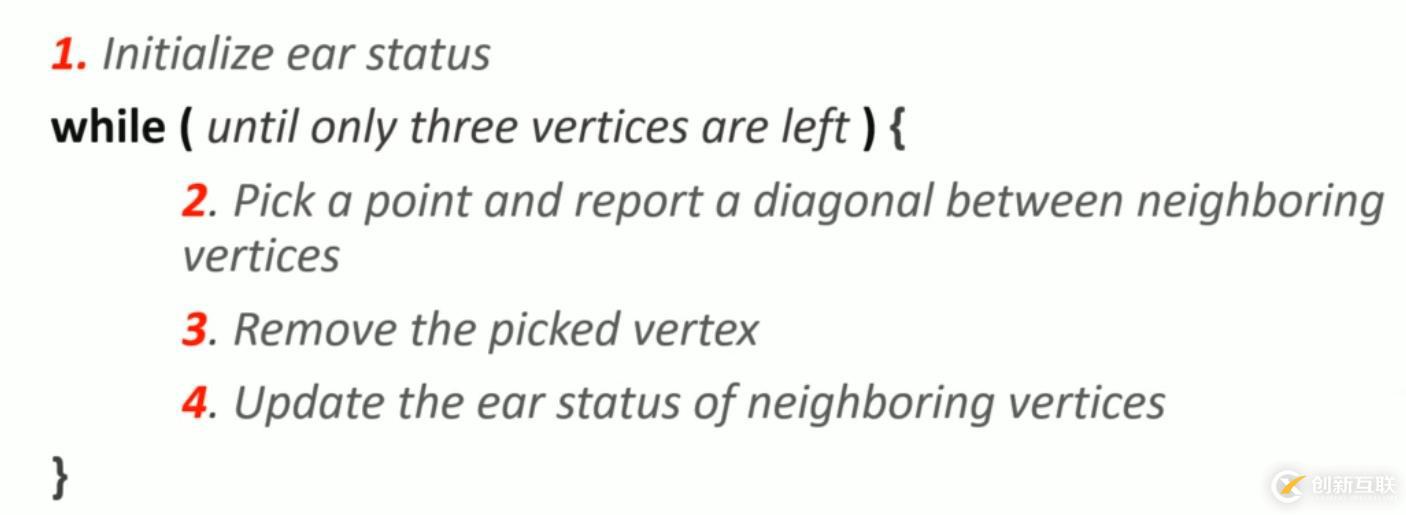
ps:自己想的一种优化算法
1.初始化一个stack,先往里面push 三个vertex
while(stack.size()>=3)
2.top三个vertex 将倒数第三个vertex与栈顶的vertex组成向量,然后计算倒数第二个vertex的相对位置,
3.if 如果倒数第二个vertex是在左边:
那么重新push倒数第三个与栈顶的vertex,记录对角线。
continue;
else:
否则三个vertex按照之前顺序push
push个新的vertex
这里用简化版本
templatestruct Vertex
{yhaida::Vectorpoint;
Vertex* next;
Vertex* prev;
Vertex(yhaida::Vector& _point, Vertex* _next=nullptr, Vertex* _prev=nullptr)
:point(_point), next(_next), prev(_prev)
{}
};
typedef VertexVertex2d;
typedef VertexVertex3d;
templateclass Polygon
{std::vector*>vertex_list;
public:
Polygon(const std::vector>& points)
{ const int size = points.size();
if (size< 3)
std::cout<< "Not enough points to construct a polygon\n"<< std::endl;
for (auto _point : points)
{ vertex_list.push_back(new Vertex(_point));
}
for (size_t i = 0; i< size; i++)
{ vertex_list[i]->next = vertex_list[(i + 1) / size];
if (i != 0)
vertex_list[i]->prev = vertex_list[i - 1];
else
vertex_list[i]->prev = vertex_list[size - 1];
}
}
std::vector< Vertex*>getVertices()
{ return vertex_list;
}
};
typedef PolygonPolygonS3d;
typedef PolygonPolygonS2d; 1.检查顶点是否是个凸点
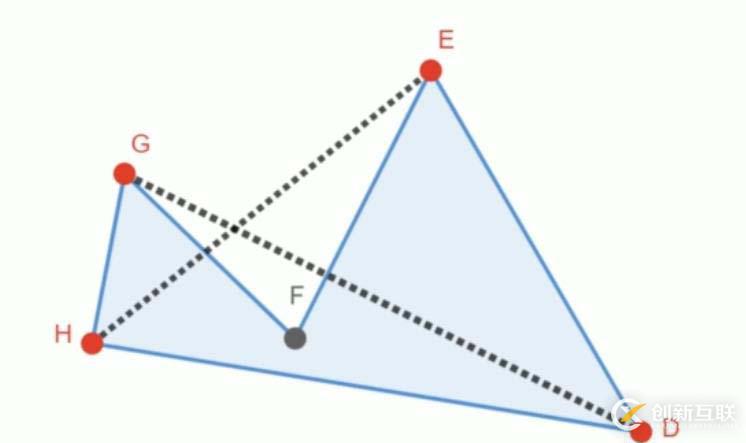
2.检查相邻两个顶点是否能连接对角线(主要是判断对角线是否在多边形内)
注意单独检查是否有交点不足判断对角线是否处于内部。
比如下图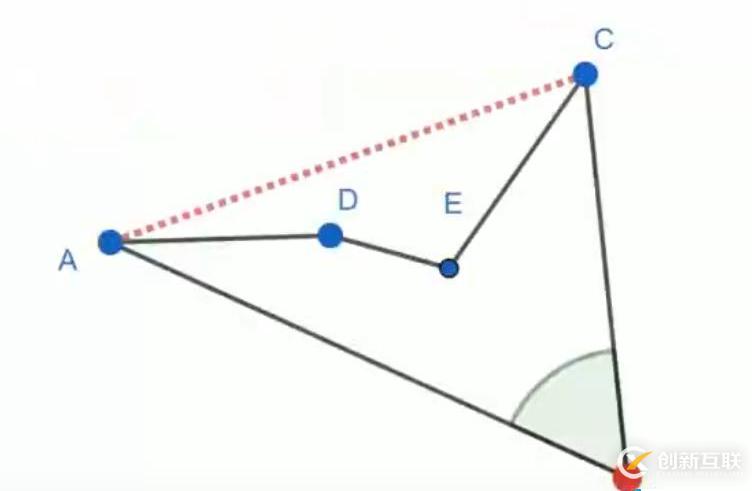
判断步骤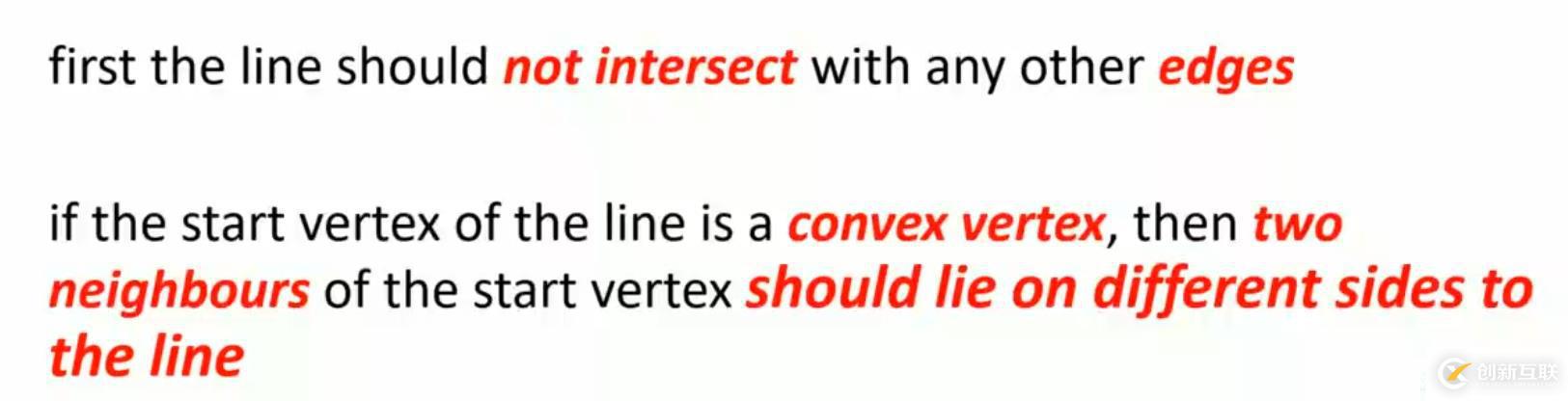

static bool leftOrBeyond(const Point2d& a, const Point2d& b, const Point2d& c)
{int position = orientation2d(a, b, c);
return (position == RELATIVE_POSITION::LEFT || position == RELATIVE_POSITION::BEYOND);
}
static bool left(const Point2d& a, const Point2d& b, const Point2d& c)
{return orientation2d(a, b, c) == RELATIVE_POSITION::LEFT;
}
static bool interiorCheck(const Vertex2d* v1, const Vertex2d* v2)
{if (leftOrBeyond(v1->point, v1->next->point, v1->prev->point)) {// v1 is vonvx vertex
return left(v1->point, v2->point, v1->prev->point)
&& left(v2->point, v1->point, v1->next->point);
}
// v1 is relex vertex
return !(leftOrBeyond(v1->point, v2->point, v1->next->point)
&& leftOrBeyond(v2->point, v1->point, v1->prev->point));
}
bool isDiagonal(const Vertex2d* v1, const Vertex2d* v2, PolygonS2d* poly)
{bool prospect = true;
std::vectorvertices;
//1.先把vertex存入vector中
if (poly)
vertices = poly->getVertices();
else
{auto vertex_ptr = v1->next;
vertices.push_back((Vertex2d*)v1);
while (vertex_ptr != v1)
{ vertices.push_back(vertex_ptr);
vertex_ptr = vertex_ptr->next;
}
}
//2.判断是否相交
Vertex2d* current, * next;
current = vertices[0];
do
{next = current->next;
if (current != v1 && next != v1 && current != v2 && next != v2
&& yhaida::Intersection(v1->point, v2->point, current->point, next->point))
{ prospect = false;
break;
}
current = next;
} while (current != vertices[0]);
return prospect && interiorCheck(v1, v2) && interiorCheck(v2, v1);
} 
static bool isConvex(Vertex2d* v0, Vertex2d* v1, Vertex2d* v2)
{return leftOrBeyond(v1->point, v2->point, v0->point);
}
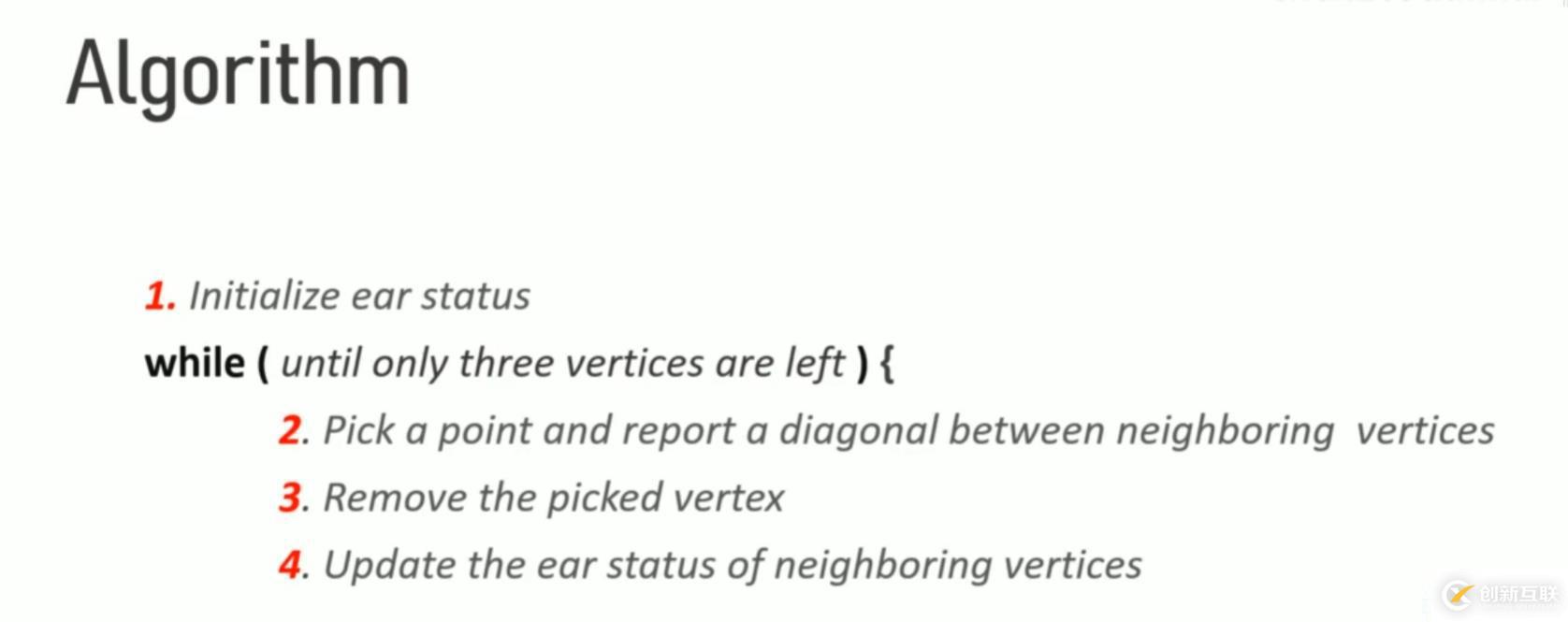
static void initialize_ear_status(PolygonS2d* polygon)
{Vertex2d* v0, * v1, * v2;
auto vertices = polygon->getVertices();
v1 = vertices[0];
do
{v0 = v1->prev;
v2 = v1->next;
if (isConvex(v0, v1, v2))//判断是否是凸点
v1->is_ear = isDiagonal(v0, v2);//是否是内对角线是通用函数
v1 = v1->next;
} while (v1 != vertices[0]);
}
void Triangulate_earclipping(PolygonS2d* poly, std::vector& edge_list)
{initialize_ear_status(poly);
auto vertex_list = poly->getVertices();
int no_vertex_to_process = vertex_list.size();
Vertex2d* v0, * v1, * v2, * v3, * v4;
while (no_vertex_to_process >3)
{for (size_t i = 0; i< vertex_list.size(); i++)
{ v2 = vertex_list[i];
if (v2->is_ear && !v2->is_processed)//v2应该被处理,并且还未被处理
{ v1 = v2->prev;
v0 = v1->prev;
v3 = v2->next;
v4 = v2->next;
edge_list.push_back(Edge2d(*v1, *v3));
v2->is_processed = true;
//删除v2
v1->next = v3;
v3->prev = v1;
//更新
if (isConvex(v1->prev, v1, v1->next))
v1->is_ear = isDiagonal(v0, v3,nullptr);
if (isConvex(v3->prev, v3, v3->next))
v3->is_ear = isDiagonal(v1, v4, nullptr);
no_vertex_to_process--;
if (no_vertex_to_process<= 3)
break;
}
}
}
} 你是否还在寻找稳定的海外服务器提供商?创新互联www.cdcxhl.cn海外机房具备T级流量清洗系统配攻击溯源,准确流量调度确保服务器高可用性,企业级服务器适合批量采购,新人活动首月15元起,快前往官网查看详情吧
当前题目:美术馆定理三角划分c++实现-创新互联
文章出自:https://www.cdcxhl.com/article18/ecidp.html
成都网站建设公司_创新互联,为您提供手机网站建设、App开发、网站维护、网站制作、搜索引擎优化、响应式网站
声明:本网站发布的内容(图片、视频和文字)以用户投稿、用户转载内容为主,如果涉及侵权请尽快告知,我们将会在第一时间删除。文章观点不代表本网站立场,如需处理请联系客服。电话:028-86922220;邮箱:631063699@qq.com。内容未经允许不得转载,或转载时需注明来源: 创新互联

- 成都网站建设中定制网站与模板网站的区别? 2016-10-25
- 自助建站和定制网站都是付费的差别在那里呢? 2023-03-05
- 北京网站定制:定制网站有哪些值得你追求的好处 2021-08-24
- 定制网站需要注意的七点! 2022-05-10
- 什么样的企业适合做定制网站? 2023-03-08
- 成都定制网站的维护工作至关重要 2022-07-04
- 定制网站设计,帮助你的企业在北京的网络中脱颖而出 2019-05-06
- 定制网站建设如何让网站盈利? 2023-01-06
- 无论普通建站还是高端定制网站建设方案都不可或缺 2022-02-15
- 成都网站建设全面解析:定制网站的优劣,这一次终于全明白了! 2022-08-07
- 成都定制网站建设需要多少钱 2022-12-29
- 做网站定制网站建设,问问专业人士网站建设费用要花多少钱? 2022-09-01